
Intake Logic
We need to ensure the direction of the motor is correct before we go.
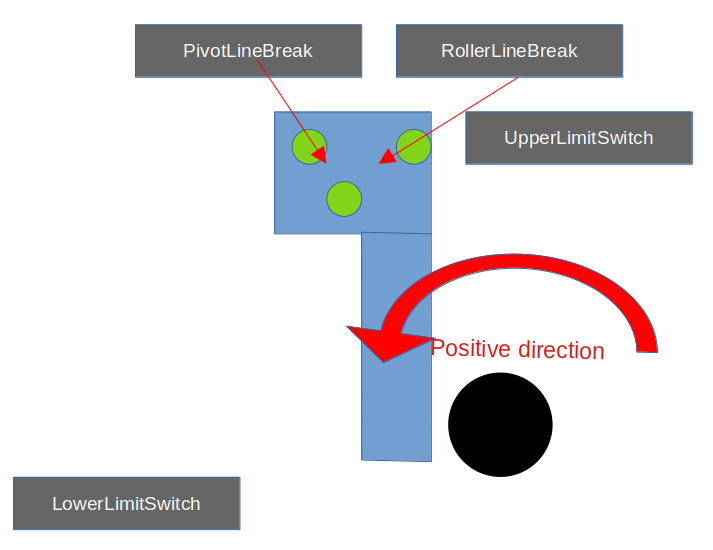
Take a look at runPivot() within Intake() which uses the limit switches to protect the mechanism
State Machine
Review state machines with this video: https://www.youtube.com/watch?v=-Yicg2TTMPs&ab_channel=MATLAB
We have a state machine for our pivot. Check out the states defined in intake
Then look how the states are defined within periodic()
You will now need to implement the command PivotRetract by changing the state of the pivot;
Intake command
there are a few additional commands that need to be implements for our intake command to function
Take a look at the TODO and implement those commands.
LoggedTunableNumbers
test you work if it performs correctly change your hardcoded numbers into LoggedTunableNumbers so we can easily change the following
- pivot deploy and retract voltage
- intake roller voltage
- Wait time from the time linebreak is triggered and rollers stop
No Comments